

行业新闻
人机交互机器视觉应用潜力比你想象的要大
日期:2017-03-29
来源:三姆森科技
香港中文大学天石机器人研究所所长刘云辉教授自本科起就从事机器人研究,至今已经有数十年的研发经验。在 ACT Lab 和深圳湾联合举办的“机器人控制系统和视觉的融合”活动中,刘云辉教授向慕名而来的创业者们分享了自己在机器人领域的所思所得。
梳理本次演讲的重点和要点,带领读者了解机器视觉领域最前沿的研究课题。
三维视觉技术大有可为
实时三维视觉技术应用广泛,在机器控制、物件抓取和人机交互等技术领域,都不能脱离实时三维视觉技术。正因如此,该技术有着巨大的商业潜力。据报道,预计 2020 年,全球 3D 成像系统市场预计能达到 536 亿人民币,年度复合增长率 39.4%,尤其是在体育医学、矫形外科学、人体测量等医学领域,对 3D 成像技术的需求更为强烈。
刘云辉教授研究实时三维视觉技术多年,他认为:“研究三维视觉技术,归根结底,就是要理解什么是视觉信息,然后将这些视觉信息在实际的场景中应用起来。”他研发的基于结构光的双目视觉技术具有精度高、测量速度快、动态拍摄等特点,并且已经应用在商业化的 3D 成像系统中。
工厂叉车也要自动驾驶
目前,大型工厂的室内物件搬运 70% 靠的是人工驾驶叉车进行操作,但从事重体力劳动工人的人工成本上升和人力资源的短缺,对很多行业造成重大影响,移动机械的自动化改造需求迫切。

刘教授表示,目前为了保证安全性,移动器械的速度并没有做得太快。不过,制造业、建筑业、采矿业、物流业等领域对室内移动器械自动驾驶有强烈的需求,所以,该项技术在未来会有很大的发展空间。
“软”“硬”两手抓
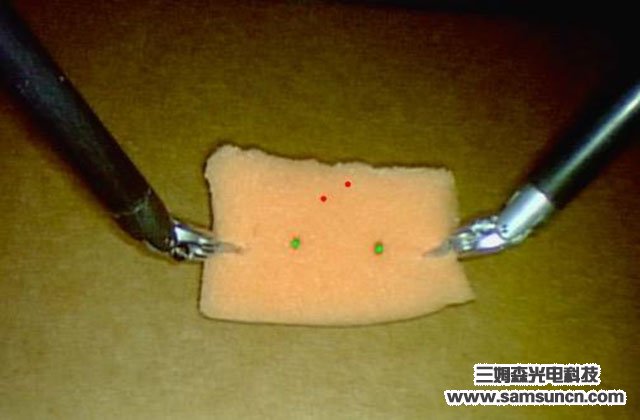
机器人或者机械臂所抓取的物件基本上都是刚体,很少能对变形体进行抓取。不过,在日常生活中,很多物件并不是棱角分明并且内部结构坚硬的刚体,而是以柔性体的形式存在,比如日常所穿的衣服、吃的食物、线材、柔性 PCB 以及人体组织。
刘云辉教授认为,在需要操作形变体的领域中,医疗健康对该技术的需求最强烈并且对操作的精准度也更高。刘教授结合自身的研发经验补充说:“医疗手术机器人的研发主要有三个挑战:首先是安全性,医疗手术中不能容许半点差错,所以如何保证手术机器人的安全性,以及与操作医师的有效配合是重中之重;保证安全性后,机器人如何在柔软的体内进行解剖和组织切除,机械结构如何设计,视觉系统如何设计,就是研究人员面临的第二大挑战;第三,如何让不懂机器人技术的医生快速上手操作,人机交互如何设计,则是第三个挑战。”
人形才是最适的人机交互方式
我们周围的生活环境是以人类的行为方式为基准而建立的,人类可以相当轻松地上楼梯、开门、适应各种地形,所以说最好的机器人形态就是人形机器人。同理,人和人的沟通是我们最习惯的交互方式,所以最好的人机交互就是机器人以“人”的方式进行交互。

刘云辉教授认为,相对于语言和表情,让机器人模拟人的动作在技术上更容易实现,通过用体感设备让机器人模仿人类的肢体动作,学习人类的行为模式,增强机器人的智能,并最终实现自然的人机交互。
