

行业新闻
人工智能‖深入解析无人驾驶
日期:2018-12-10
来源:三姆森科技
定位技术是自动驾驶车辆行驶的基础。目前常用的技术包括线导航、磁导航、无线导航、视觉导航、导航、激光导航等。
其中磁导航是目前最成熟可靠的方案,现有大多数应用均采用这种导航技术。磁导航技术通过在车道上埋设磁性标志来给车辆提供车道的边界信息,磁性材料具有好的环境适应性,它对雨天,冰雪覆盖,光照不足甚至无光照的情况都可适应,不足之处是需要对现行的道路设施作出较大的改动,成本较高。同时磁性导航技术无法预知车道前方的障碍,因而不可能单独使用。
视觉导航对基础设施的要求较低,被认为是最有前景的导航方法。在高速路和城市环境中视觉方法受到了较大的关注。
无人驾驶汽车感知依靠传感器。目前传感器性能越来越高、体积越来越小、功耗越来越低,其飞速发展是无人驾驶热潮的重要推手。反过来,无人驾驶又对车载传感器提出了更高的要求,又促进了其发展。
用于无人驾驶的传感器可以分为四类:
雷达传感器。
主要用来探测一定范围内障碍物(比如车辆、行人、路肩等)的方位、距离及移动速度,常用车载雷达种类有激光雷达、毫米波雷达和超声波雷达。激光雷达精度高、探测范围广,但成本高,比如Google无人车顶上的64线激光雷达成本高达70多万元人民币;毫米波雷达成本相对较低,探测距离较远,被车企广泛使用,但与激光雷达比精度稍低、可视角度偏小;超声波雷达成本最低,但探测距离近、精度低,可用于低速下碰撞预警。
视觉传感器。
主要用来识别车道线、停止线、交通信号灯、交通标志牌、行人、车辆等。常用的有单目摄像头、双目摄像头、红外摄像头。视觉传感器成本低,相关研究与产品非常多,但视觉算法易受光照、阴影、污损、遮挡影响,准确性、鲁棒性有待提高。所以,作为人工智能技术广泛应用的领域之一的图像识别,也是无人驾驶汽车领域的一个研究热点。
定位及位姿传感器。
主要用来实时高精度定位以及位姿感知,比如获取经纬度坐标、速度、加速度、航向角等,一般包括全球卫星定位系统(GNSS)、惯性设备、轮速计、里程计等。现在国内常用的高精度定位方法是使用差分定位设备,如RTK-GPS,但需要额外架设固定差分基站,应用距离受限,而且易受建筑物、树木遮挡影响。近年来很多省市的测绘部门都架设了相当于固定差分基站的连续运行参考站系统(CORS),比如辽宁、湖北、上海等,实现了定位信号的大范围覆盖,这种基础设施建设为智能驾驶提供了有力的技术支撑。定位技术是无人驾驶的核心技术,因为有了位置信息就可以利用丰富的地理、地图等先验知识,可以使用基于位置的服务。
车身传感器。
来自车辆本身,通过整车网络接口获取诸如车速、轮速、档位等车辆本身的信息。
驾驶员认知靠大脑,无人驾驶汽车的“大脑”则是计算机。无人车里的计算机与我们常用的台式机、笔记本略有不同,因为车辆在行驶的时候会遇到颠簸、震动、粉尘甚至高温的情况,一般计算机无法长时间运行在这些环境中。所以无人车一般选用工业环境下的计算机——工控机。
工控机上运行着操作系统,操作系统中运行着无人驾驶软件。如图1所示为某无人驾驶车软件系统架构。操作系统之上是支撑模块(这里模块指的是计算机程序),对上层软件模块提供基础服务。
支撑模块包括:虚拟交换模块,用于模块间通信;日志管理模块,用于日志记录、检索以及回放;进程监控模块,负责监视整个系统的运行状态,如果某个模块运行不正常则提示操作人员并自动采取相应措施;交互调试模块,负责开发人员与无人驾驶系统交互。
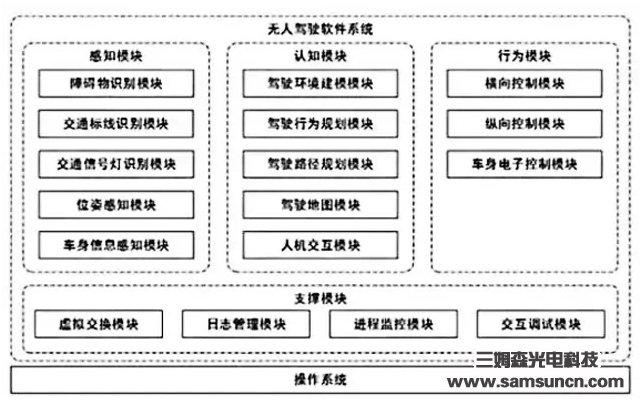 图:某无人驾驶车软件系统架构
图:某无人驾驶车软件系统架构
除了对外界进行认知之外,机器还必须要能够进行学习。深度学习是无人驾驶技术成功地基础,深度学习是源于人工神经网络的一种高效的机器学习方法。深度学习可以提高汽车识别道路、行人、障碍物等的时间效率,并保障了识别的正确率。通过大量数据的训练之后,汽车可以将收集到的图形,电磁波等信息转换为可用的数据,利用深度学习算法实现无人驾驶。
其中磁导航是目前最成熟可靠的方案,现有大多数应用均采用这种导航技术。磁导航技术通过在车道上埋设磁性标志来给车辆提供车道的边界信息,磁性材料具有好的环境适应性,它对雨天,冰雪覆盖,光照不足甚至无光照的情况都可适应,不足之处是需要对现行的道路设施作出较大的改动,成本较高。同时磁性导航技术无法预知车道前方的障碍,因而不可能单独使用。
视觉导航对基础设施的要求较低,被认为是最有前景的导航方法。在高速路和城市环境中视觉方法受到了较大的关注。
无人驾驶汽车感知依靠传感器。目前传感器性能越来越高、体积越来越小、功耗越来越低,其飞速发展是无人驾驶热潮的重要推手。反过来,无人驾驶又对车载传感器提出了更高的要求,又促进了其发展。
用于无人驾驶的传感器可以分为四类:
雷达传感器。
主要用来探测一定范围内障碍物(比如车辆、行人、路肩等)的方位、距离及移动速度,常用车载雷达种类有激光雷达、毫米波雷达和超声波雷达。激光雷达精度高、探测范围广,但成本高,比如Google无人车顶上的64线激光雷达成本高达70多万元人民币;毫米波雷达成本相对较低,探测距离较远,被车企广泛使用,但与激光雷达比精度稍低、可视角度偏小;超声波雷达成本最低,但探测距离近、精度低,可用于低速下碰撞预警。
视觉传感器。
主要用来识别车道线、停止线、交通信号灯、交通标志牌、行人、车辆等。常用的有单目摄像头、双目摄像头、红外摄像头。视觉传感器成本低,相关研究与产品非常多,但视觉算法易受光照、阴影、污损、遮挡影响,准确性、鲁棒性有待提高。所以,作为人工智能技术广泛应用的领域之一的图像识别,也是无人驾驶汽车领域的一个研究热点。
定位及位姿传感器。
主要用来实时高精度定位以及位姿感知,比如获取经纬度坐标、速度、加速度、航向角等,一般包括全球卫星定位系统(GNSS)、惯性设备、轮速计、里程计等。现在国内常用的高精度定位方法是使用差分定位设备,如RTK-GPS,但需要额外架设固定差分基站,应用距离受限,而且易受建筑物、树木遮挡影响。近年来很多省市的测绘部门都架设了相当于固定差分基站的连续运行参考站系统(CORS),比如辽宁、湖北、上海等,实现了定位信号的大范围覆盖,这种基础设施建设为智能驾驶提供了有力的技术支撑。定位技术是无人驾驶的核心技术,因为有了位置信息就可以利用丰富的地理、地图等先验知识,可以使用基于位置的服务。
车身传感器。
来自车辆本身,通过整车网络接口获取诸如车速、轮速、档位等车辆本身的信息。
驾驶员认知靠大脑,无人驾驶汽车的“大脑”则是计算机。无人车里的计算机与我们常用的台式机、笔记本略有不同,因为车辆在行驶的时候会遇到颠簸、震动、粉尘甚至高温的情况,一般计算机无法长时间运行在这些环境中。所以无人车一般选用工业环境下的计算机——工控机。
工控机上运行着操作系统,操作系统中运行着无人驾驶软件。如图1所示为某无人驾驶车软件系统架构。操作系统之上是支撑模块(这里模块指的是计算机程序),对上层软件模块提供基础服务。
支撑模块包括:虚拟交换模块,用于模块间通信;日志管理模块,用于日志记录、检索以及回放;进程监控模块,负责监视整个系统的运行状态,如果某个模块运行不正常则提示操作人员并自动采取相应措施;交互调试模块,负责开发人员与无人驾驶系统交互。
除了对外界进行认知之外,机器还必须要能够进行学习。深度学习是无人驾驶技术成功地基础,深度学习是源于人工神经网络的一种高效的机器学习方法。深度学习可以提高汽车识别道路、行人、障碍物等的时间效率,并保障了识别的正确率。通过大量数据的训练之后,汽车可以将收集到的图形,电磁波等信息转换为可用的数据,利用深度学习算法实现无人驾驶。
